Read more about Micro Drives? Enter your e-mail address here and you will receive the PDF.
Integrated Servo Motors for Mobile Robots
Mobile robots are an ever-evolving element of Industry 4.0 and the Internet of the Things. Central to smart factory development, mobile robots navigate materials from one location to another, freeing human resources to focus on more complex and valuable tasks. While central software systems network fleets of mobile robots together, advanced AI supported by sophisticated software and componentry enable robots to communicate among themselves as well as automatically sense and react to the physical world of people and objects around them.
Main classifications of mobile robots include Autonomous Mobile Robots (AMR) and Automated Guided Vehicles (AGV). Many types of autonomous and semi-autonomous mobile robots exist in the market. Whatever the specific autonomy level, mobile robots are essentially intended for hauling materials from one location to another.
At the heart of robot locomotion are electric motors that power the main drive motors for forward/ reverse motion as well as steering. Electric motors also are used for material handling axes for lifting, clamping, and engaging the payload during transfer to different locations.
Mobile robots frequently incorporate brushed DC and AC induction motors, mostly due to their low cost. However, when considering torque density, efficiency, speed regulation, long life, and smoothness, nothing beats a brushless servo motor. Brushless servo motors inherently provide more accurate speed control and positioning than AC induction motors. And with no brushes to wear out, they operate maintenance-free for years.
Integrated Servo Motors Open Space in Compact Robot Housings
The integrated servo motor is a variation of a brushless servo motor gaining popularity in mobile robot applications because of its reduced space requirements and developmental cost savings. Integrated servo motors combine the servo motor and the motor’s electronic controller (including drive or amplifier) into a single housing to save space and eliminate wiring.
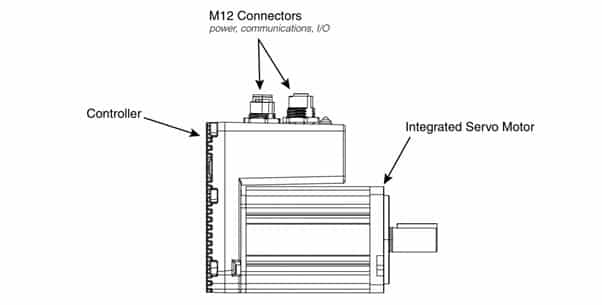
The integrated servo motor typically houses control electronics at the back of the motor, near the feedback device and/or along one side of the motor. Connectors for power, communications, and I/O also are positioned near the back or side of the motor, usually grouped together on one surface. No other external electronics package is required to drive or control the motor. Command signals from the mobile robot’s central processing unit can be wired directly to the integrated servo motor.
Combining a servo motor and controller into a single, integrated package eliminates the need for mounting an external motor controller inside the body of the mobile robot, saving valuable space and reducing the size of the robot. Integrating the motor controller into the motor housing also eliminates the need for motor power and feedback cables normally needed to connect the separate servo motor to its external controller.
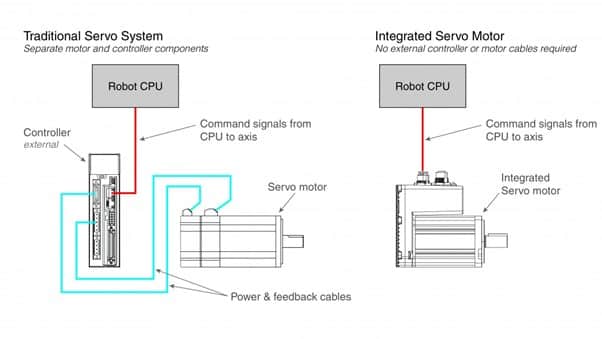
Depending on the servo motor size, cables can be quite bulky. Eliminating these cables frees additional space in the robot to accommodate other material handling mechanisms, sensors, or operator-interface components. Figure 2 shows the space savings of an integrated servo motor compared to a traditional servo system with separate motor and controller components.
Fewer Components = Reduced Costs
The robot design cycle requires fitting the various electric motors, actuators for material handling functions, and other system components into a tightly constrained space. Eliminating the external motor controller from the bill of materials saves space and money as integrated control electronics are typically less expensive than external motor controllers. Not worrying about the placement and wiring of an external motor controller also enables faster design iterations during the development process.
Robot designers can focus less on the motor controller and more on non-motor system components. This logic holds true for both drive and lift axes as designers can opt to use integrated motors throughout the robot, realizing the benefits of saving space and money on all motor axes.
Multiple Interface Options
Electrical interfaces to an integrated servo motor are simple, requiring only three signal types:
Local I/O points on the integrated motor are available when operators prefer wiring discrete signals directly to the integrated servo motor instead of the central processing unit. Examples include hard-wired enable or e-stop circuits. Digital outputs from the integrated servo motor can power indicator lamps or other operator-interface devices. Digital I/O at the motor axis is not required for every robot design, but is available when needed.
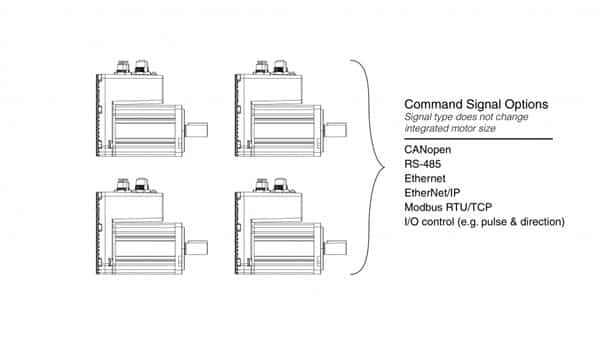
The onboard controllers of integrated servo motors have the same command interfaces as external motor controllers including CANopen, RS-485, Modbus, and Ethernet connections as well as discrete I/O interfaces like pulse & direction. Regardless of the command interface, the form factor of the integrated servo motor does not change. Figure 3 outlines the different command signal options available from an integrated servo motor.
Integrated motors benefit the mobile robot designer in many areas:
- By reducing the number of components in the system,
- Eliminating cables or wire harnesses,
- Freeing valuable space,
- Simplifying the bill of materials,
- Enabling faster design cycles,
- Saving money.
To learn more about Applied Motion Products’ range of integrated motors for mobile robots, contact us or download the datasheet.

